
识别可达厘米级别,新算法冲上 Semantic KITTI 评测榜首
发布时间:2025-05-23 11:23:43
作者:益华网络
来源:undefined
浏览量(43)
点赞(64)
摘要:By 超神经 内容概要:近日,在自动驾驶的权威评测 Semantic KITTI 上,一种新算法, 在「单帧 3D 点云语义分割」排行榜上,成功登上了评测榜的榜首。它可用在无人物流车上,帮助无人车更好地理解周围环境,更精确地识别障碍物。 关键
By 超神经
内容概要:近日,在自动驾驶的权威评测 Semantic KITTI 上,一种新算法, 在「单帧 3D 点云语义分割」排行榜上,成功登上了评测榜的榜首。它可用在无人物流车上,帮助无人车更好地理解周围环境,更精确地识别障碍物。
关键词:自动驾驶 算法评测 语义分割
所有算法模型的好坏,都需要一个评测标准来判定,自动驾驶领域也不例外。Semantic KITTI 评测,算得上是自动驾驶里最权威的一个标准,而近日排在榜首的一种新算法,成功地让自动驾驶的障碍物识别能力,达到了厘米级别。权威评测榜单,涵盖最先进技术
KITTI 数据集是当前最权威,最大的自动驾驶算法评测数据集。该数据集常用于评测立体图像,光流,视觉测距,3D 物体检测和 3D 跟踪等技术的性能。由它细分而来的 Semantic KITTI 数据集,是为了推动基于激光的语义分割研究而得来,也是模型在语义分割方向的一个检验基石。
Semantic KITTI 数据集官网
Semantic KITTI 标准评测,需要经过多个步骤的测量和验证,把各种场景下的汽车、行人、道路、摩托车、自行车、交通标志、建筑物和植被等多类物体准确分割出来。
算法需要通过全类别分割平均交并比(mIOU)和整体准确率(accuracy)两大指标,来验证自己的能力水平。在两项指标的评比中均拿下第一,荣获「单帧 3D 点云语义分割」排行榜榜首的算法,是由阿里达摩院提交的。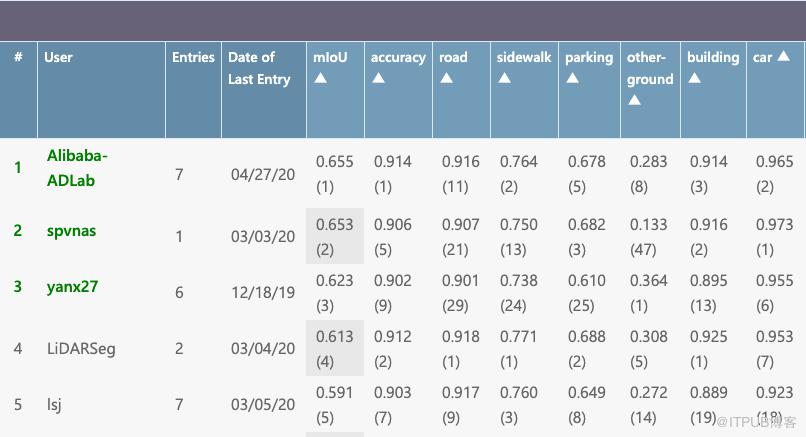 评测排行榜的名单
评测排行榜的名单
提升环境理解力,达到厘米级识别
排在榜首的算法,以激光点为载体,结合每个 3D 点在鸟瞰、前视等视角下的邻域特征,通过多层级联编码进行特征学习,增强了 3D 点的特征表示能力,提高了语义识别的准确性。其中点云是计算机视觉领域常用的三维数据表示方式,它包含物体的丰富信息,比如三维坐标、颜色、分类值、强度值、时间等等。而 3D 点云语义分割,是自动驾驶中常用的一项技术,是指从周围的环境中,识别并分析出不同的物体。该项技术已经被用在了无人物流车中,它可让车辆更精细地理解道路环境,帮助识别行人,车辆,周围的建筑、绿化、障碍物等。模拟车辆行驶中对环境的理解
在实际测试中,它的识别精度达到了厘米级别,对仅有 3 厘米宽的警戒线,物流车也能准确识别并绕道而行。自动驾驶成大厂新赛道
在自动驾驶的研究层面,各大巨头公司纷纷展开自己的布局,加入了更大的资金和技术投入。前不久,阿里还发布了全球首个自动驾驶混合式仿真测试平台。该平台推出了将虚拟与现实结合的仿真技术,引进真实路测场景和云端训练,模拟一次极端场景仅需 30 秒,每天虚拟测试里程可超过 800 万公里。这些举动也预示着,自动驾驶行业在更多技术的加持下,或将更快地迈进我们的生活。扫一扫,关注我们
声明:本文由【益华网络】编辑上传发布,转载此文章须经作者同意,并请附上出处【益华网络】及本页链接。如内容、图片有任何版权问题,请联系我们进行处理。
64
